|
极客公园微信号:geekpark Atlas 机器人 来自波士顿动力公司的 Atlas 机器人已经不止一次出现在公众视线里了,在极客公园 (微信号: geekpark),我们也曾详细介绍过这家公司的源起,以及它和谷歌之间的关系。 除了机器狗,机器马之外,最受大家关注的就是两足人型机器人了。它不光看起来像人,走起路来更像人,而每一次有新的消息,它都会刷爆朋友圈,这一次,他们让机器人做出了高难度的「走梅花桩」动作。
从走平路到走砖瓦,机器人迈出的这一步不容易 虽然这些「梅花桩」并不是我们在功夫片里知道的那种,而是一些砖瓦碎片。但是从视频中我们可以看出,最新升级的算法技术完全可以过「梅花桩」这样的障碍物。
整个动作过程看上去很像一个小心翼翼的老年人,起脚会非常谨慎,在彻底落脚之前都试探多次,然后再落脚,大家都能看到,开奖,当机器人的脚踩到这些不稳定障碍物的时候,由于重力的原因,一定是会摇摇晃晃的,这时候它会将全身重量慢慢的,一点一点转移到自己的腿上,同时双手保持身体平衡,这看似容易,做起来却非常困难。每一步它都会重复这样的动作,因为地图地形并不是预先就被输入进去的。
二倍速度演示中能看到机器人「头部」摄像机在高速扫描周围的环境 我们能看到,在 3D 模拟演示中,2 倍速度的画面里,在机器人头部的摄像机会快速转动并分析脚下状况,它对地图的分析是即时的。而这个过程有机器人的动态步伐以及角动量的紧密结合,并不容易。 就连团队自己也说:「虽然目前机器人进步已经非常多, 但还是不能做到人类一样(灵活)」。团队还表示,他们的目标是想要让双足机器人在复杂地形行走,而不需要机载传感器。 走路越来越像人,我们离《西部世界》还有多远 据介绍,这一次展示绝技的两足机器人是由佛罗里达的 IHMC (人类和机器认知研究所:Institute for Human and Machine Cognition)研发,本次演示的走「梅花桩」属于他们的「双足行走(Bipedal Walking)」项目。除此之外,他们还有其他诸如「快速奔跑机器人」以及「机器人人机系统」等各方面项目的尝试。
今年波士顿动力公司的机器人频频出现在我们的视线之中,包括这家公司之前和谷歌的联系,都让我们感到好奇。而这背后,人类对于机器人的想象实际上也非常值得期待。
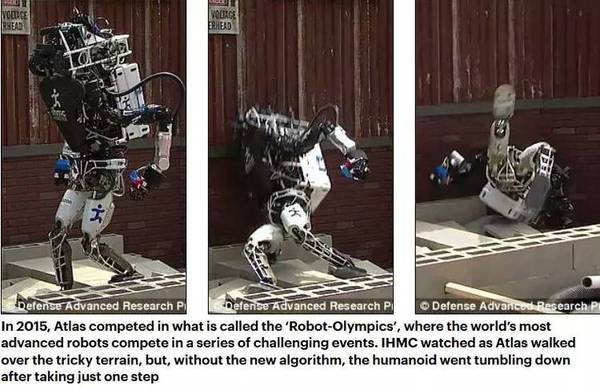
不管是双足机器人,还是四足机器人,它们的动作已经让我们很难去说是一个机器人应该表现出来的,更多的是像人,新技术的进步实际上也能带来更酷的应用场景实现。 其实在走「梅花桩」之前,波士顿动力已经在双足机器人上进行了非常多的尝试,2015年,Atlas 双足机器人还曾经参加过一场「机器人奥运会」,当时,全世界机器人技术者一起挑战了很多难题,而当时的 Atlas 还没有如今这样有效的算法,所以还曾经摔的「四脚朝天」。
但如今,机器人能在摔倒后自己站起来,能和人一起散步,能打扫卫生(是像人那样的清理屋子),开奖,能用「双手」举起重物,甚至能「金鸡独立」。这些「技能」的加强,将会大大扩展机器人的使用场景。 这让我想起了《西部世界》中的机器人,当 AI 越来越聪明的时候,机器人的动作也越来越像人类,我不知道这是否是件好事情,假如未来真的有一天,我们分不清楚机器人和人类的界限,那又会怎样呢? 近日,斯蒂芬·霍金在英国《卫报》刊文表示,对人工智能和自动化科技发展感觉到担忧,认为这将会让中产阶级丧失工作机会,造成社会更多不平等。 (责任编辑:本港台直播) |