|
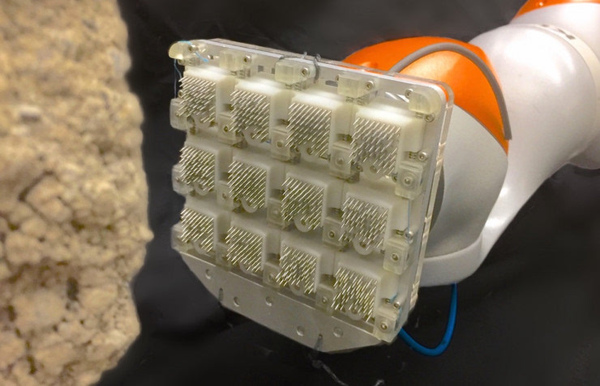
早在十多年前,来自斯坦福大学的机器人专家就开始用极小的刺阵列帮助攀岩机器人抓握粗糙的表面。此后,这类微型多刺抓爪被应用于各种机器人的研究中。近期,atv直播,连 NASA 都意识到微型多刺抓爪是帮助宇宙飞船附着于小行星的上上策。 两天前,在举办于韩国的 IEEE/RSJ 智能机器人与系统国际会议上,来自斯坦福大学的 Shiquan Wang 展示了一款针对攀岩机器人的微型多刺手掌。这种微型刺支撑的重量可以达到旧式设计的四倍,如此卓越的进步足以让喷气推进实验室(JPL)的 RoboSimian DRC 机器人成为攀岩冠军。是的!有了这种微型多刺手掌的帮助,RoboSimian DRC 机器人不仅可以爬上斜坡,还能在垂直的岩石表面攀爬,甚至连陡峭的悬岩也难不倒它! 实际上,这种微型刺的运作原理类似于小爪子。虽然每个刺都又细又短,抓握面积不大,atv,但是只要总数够多,就可以支撑(或者说承受)极大的重量,正所谓众人拾柴火焰高嘛。前一代的微型刺设计,包括NASA用于小行星重定向任务(Asteroid Redirect Mission)的那些微型刺的柔性都非常高,它们可以通过让每个微型刺找到自己专属的微小抓握点,抓住粗糙至极的表面。这种柔性很强的设计应用面非常广,性能也相对稳定。但因为柔性机制使得微型刺的整体变得比较笨重,所以能塞入抓爪的微型刺的数量就少了。
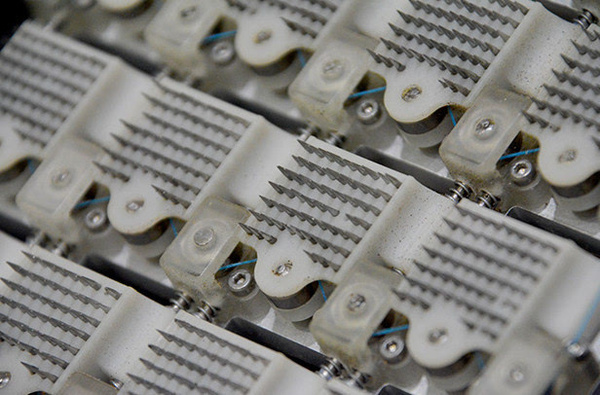
来来来!近距离看看这些微型多刺抓爪。 如果你想要支撑起尽可能大的重量,从而进行诸如攀岩这样的活动的话,就需要在表面插入尽可能多的刺来支撑重量,换句话说,你必须要采用其它的设计了。这正是斯坦福大学决定设计新型抓爪设计的原因:如果去除刺几乎所有的柔性,就能够大大提高刺的密度。刺的表面积占比下降了,但因为能塞进总量更多的刺,所以最终hold住的重量会大得多。
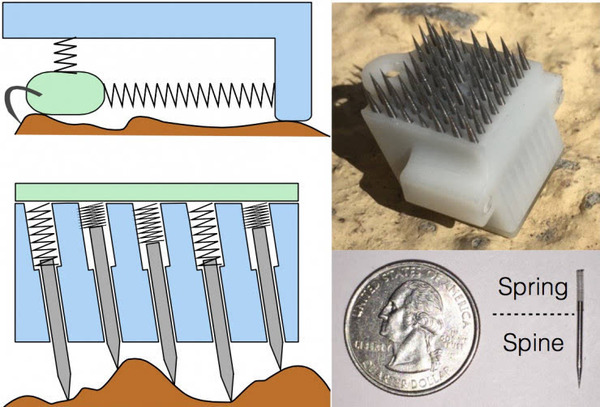
左图对比了旧款的刺机制设计(上)和新款的线性约束设计(下);右图则显示刺砖片(上)和单个带有微型弹簧的刺(下) 这些新刺的设计简单明了:每根15毫米长的钢刺套入3D打印的套管,连接弹簧会将其下压到它尝试抓握的表面。柔性轴能够辅助刺抓握粗糙的表面,60根刺会形成一个面积为18毫米x 18毫米的“砖片”。然后,十二个砖片会共同组成这个手掌原型,每个砖片都有些许回旋的空间,这有助于它更好地优化负载分配。所有的刺都会稍稍倾向手掌抓握的表面,这意味着它们会在有力量施加到手掌的时候发挥作用,而一旦力量往相反方向抽离,手掌也能够轻松脱离表面。 研究人员在九种不同的表面上对这个完整的手掌原型进行了测试,取得了高达710N的剪切附着力,相当于旧式设计的四倍多。除了极其平滑或者粗糙的表面,它还适用于包括混凝土面层在内的多数岩石表面。接下来,该手掌将运用到包含被微型刺覆盖的柔性手指和脚趾上。 至于未来,喷气推进实验室(JPL)的RoboSimian机器人将利用这种设计实现什么样的功能,我们拭目以待。 viaIEEE Spectrum (责任编辑:本港台直播) |